4月2日,DJI大疆创新在美国加州中区联邦地方法院起诉昊翔国际有限公司(Yuneec International Co.Ltd)及昊翔美国公司(Yuneec USA)侵犯其在美国获得授权的专利,并要求在北美范围内申请销售保护,禁售昊翔Typhoon H系列无人机。
消息一经发布,便引发了媒体和业界资深人士的广泛讨论。
有学者认为:专利的作用就是用来保护申请者权利的,Yuneec如果侵犯了DJI的技术核心,以此寻求诉诸法律,是可以理解的。
但也有人指责DJI:频繁进行专利诉讼,目的只是为了拖延这些公司的产品在海外的上市时间,因为在最终判决前,这些公司的产品无法获得销售许可。
还有人认为:之所以DJI紧盯着Yuneec,是因为Intel的资金和技术帮助Yuneec快速成长已经构成威胁。尤其在新一代的智能无人机竞争中,唯一有望对抗DJI精灵4的产品——Typhoon H发布之际,来这么一场官司,显然是为了扰乱Yuneec的布局,给自家的精灵4产品留足销售时间。
孰是孰非,我们5iMX不是专利专家不好判断(国外专利官司非常复杂,通常要打1-2年才有结果)。今天,5iMX只从一个模友的角度,研究一下专利纠纷中很重要的一点,也是广大模友和无人机爱好者最关心的热点话题——避障技术。旨在分享一些研究心得,与这场官司孰是孰非无关。
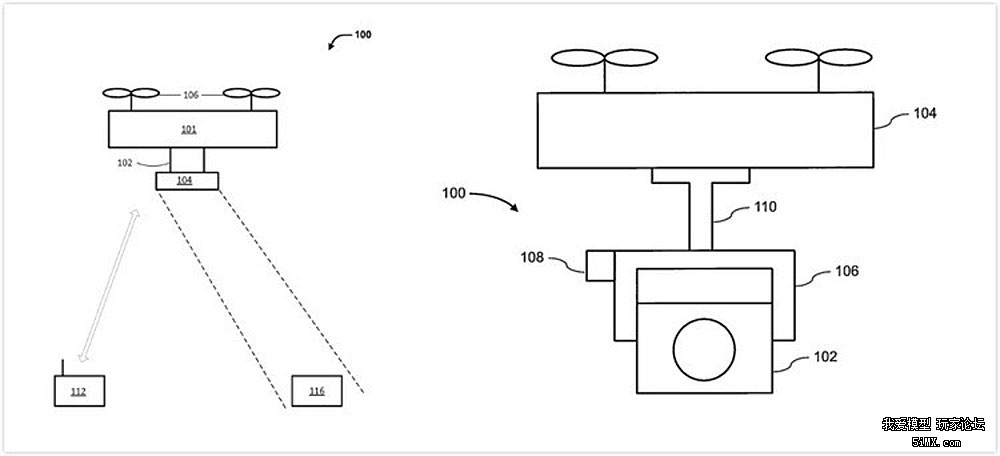
我们先来看看大疆的精灵4避障原理:借鉴仿生学原理,利用左右两只眼睛看到物体的视觉差,获得物体深度和距离的信息。精灵4能够识别大于500像素,最近0.7米,最远15米的障碍物;水平视角60°,垂直视角为30°。
注:精灵4在机身前部脚架上方安置有两只摄像头,通过这两只摄像头捕捉到的画面,利用计算机快速完成三维建模,便可发现前方的障碍物。俗称“双目视觉避障”系统。
通过观察大疆最早发布的Guidance避障模块便能发现,精灵4的双目避障其实是沿用了Guidance的核心算法,但又有所区别。从下图可以看出,Guidance是“双目+超声波”的复合避障结构,而精灵4取消了超声波辅助,只沿用了双目避障系统。
注:Guidance是“双目视觉+超声波”的复合避障结构
双目视觉避障的优势体现在距离远(15米),能保证三维信息精准。缺点是弱光环境下(夜晚)不行,另外无法识别电线、树枝等细小障碍物。
那么问题来了
Yuneec的Typhoon H也是采用的类似的避障系统吗?
从我们获取的信息来看,Yuneec是采用的Intel的RealSense(实时感知)技术。RealSense其实就是一个自带实感技术的摄像头系统,有F200、R100、R200三款产品,其中比较常见的是F200和R200。其中F表示前置摄像头(就是用来自拍的那个),R表示后置摄像头,由于早期的定位原因,所以就以手机和平板上的前后置摄像头来命名了。
RealSense能够通过计算所拍摄物体与摄像头的距离,从而获得景深数据,对物体进行定位。当然,既然有了位置信息,就可以让无人机实现自主避障。整体的原理与微软的Kinect接近。这也就是为什么英特尔在演示RealSense技术的时候,其形式和 Xbox 的体感游戏类似了。
注:Intel RealSense F200实感3D方案内部构造
F200方案采用“结构光”的原理,由红外激光发射机发射结构化模式的第1类红外光,红外传感器用于捕捉物体的尺寸特征,而位于中间的色彩传感器则用于捕捉画面细节。不过F200有效距离只有0.2~1.2米,因此只能用于室内。